Implementasi Algoritma Convolutional Neural Network Pada Kendaraan Tanpa Awak Skala Kecil
Implementation of Convolutional Neural Network Algorithm on Small-Scale Unmanned Vehicles
DOI:
https://doi.org/10.35814/asiimetrik.v5i1.4082Keywords:
autonomous vehicles, convolutional neural network, computer visionAbstract
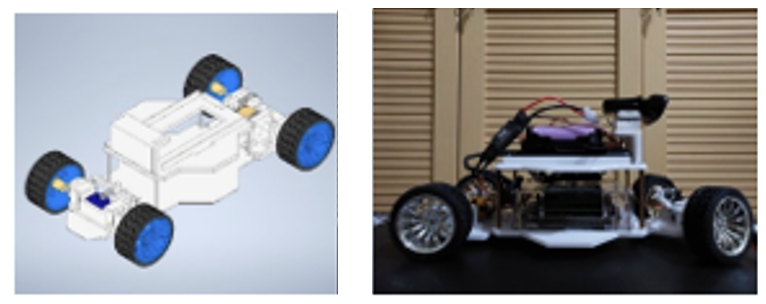
Autonomous Vehicle is a vehicle capable of navigating the car independently without requiring input from the driver. This research aims to design and manufacture a prototype of an unmanned vehicle that can maneuver across a simple artificial road. This study also aims to analyze the performance of the NVIDIA Jetson Nano in processing deep learning models and driving actuators according to the predictions given by the model. The research stages include designing a prototype, creating an artificial path, taking image data, conducting training, and then implementing the training model on the car prototype. After testing the prototype, the training model made the correct steering angle prediction using epoch 50 with RMSE train and validation, 0.1792 and 0.1896, respectively. NVIDIA Jetson Nano also performs well in computing steering angle predictions with live input from the camera.
Downloads
References
Bilbao, I. dan Bilbao, J. (2017) ‘Overfitting problem and the over-training in the era of data: Particularly for Artificial Neural Networks’, in 2017 eighth international conference on intelligent computing and information systems (ICICIS). IEEE, hal. 173–177.
Bock, S. dan Weiß, M. (2019) ‘A proof of local convergence for the Adam optimizer’, in 2019 International Joint Conference on Neural Networks (IJCNN). IEEE, hal. 1–8.
Brownlee, J. (2022) Difference Between a Batch and an Epoch in a Neural Network, MachineLearningMastery.com. Available at: https://machinelearningmastery.com/difference-between-a-batch-and-an-epoch/ [Online] (Diakses: 8 September 2022).
Cass, S. (2020) ‘Nvidia makes it easy to embed AI: The Jetson nano packs a lot of machine-learning power into DIY projects-[Hands on]’, IEEE Spectrum, 57(7), hal. 14–16.
Eraqi, H.M., Moustafa, M.N. dan Honer, J. (2017) ‘End-to-end deep learning for steering autonomous vehicles considering temporal dependencies’, in 31st Conference on Neural Information Processing Systems (NIPS 2017). 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA: arXiv, hal. 1–8.
Gu, J. dkk. (2018) ‘Recent advances in convolutional neural networks’, Pattern recognition, 77, hal. 354–377.
Hussain, R. dan Zeadally, S. (2018) ‘Autonomous cars: Research results, issues, and future challenges’, IEEE Communications Surveys & Tutorials, 21(2), hal. 1275–1313.
Jogin, M. dkk. (2018) ‘Feature extraction using convolution neural networks (CNN) and deep learning’, in 2018 3rd IEEE international conference on recent trends in electronics, information & communication technology (RTEICT). 2018 3rd IEEE international conference on recent trends in electronics, information & communication technology (RTEICT), IEEE, hal. 2319–2323.
Polri, K. (2022) Statistik Laka, Korlantas Polri. Available at: https://korlantas.polri.go.id/statistik-laka/ [Online] (Diakses: 7 June 2022).
Prasetyo, E.W. dkk. (2020) ‘Spatial Based Deep Learning Autonomous Wheel Robot Using CNN’, Lontar Komputer: Jurnal Ilmiah Teknologi Informasi, 11(3), hal. 167–177.
Radiuk, P.M. (2017) ‘Impact of training set batch size on the performance of convolutional neural networks for diverse datasets’, Information Technology and Management Science, 20(1), hal. 20–24.
Rawat, R., Patel, J.K. dan Manry, M.T. (2013) ‘Minimizing validation error with respect to network size and number of training epochs’, in The 2013 international joint conference on neural networks (IJCNN). The 2013 international joint conference on neural networks (IJCNN), Dallas, TX, USA: IEEE, hal. 1–7.
Shrestha, A. dan Mahmood, A. (2019) ‘Review of deep learning algorithms and architectures’, IEEE access, 7, hal. 53040–53065.
Sutandi, A.C. (2015) ‘Pentingnya Transportasi Umum untuk Kepentingan Publik’, Jurnal Administrasi Publik, 12(1), hal. 19–34.
Vijitkunsawat, W. dan Chantngarm, P. (2020) ‘Comparison of Machine Learning Algorithm’s on Self-Driving Car Navigation using Nvidia Jetson Nano’, in 2020 17th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON). 2020 17th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand: IEEE, hal. 201–204.
Vogelsang, D.C. dan Erickson, B.J. (2020) ‘Magician’s corner: 6. TensorFlow and TensorBoard’, Radiology: Artificial Intelligence, 2(3), hal 1-3.
Wang, Q. dkk. (2022) ‘A comprehensive survey of loss functions in machine learning’, Annals of Data Science, 9(2), hal. 187–212.